Formerly

Now
 Raven
Raven
Raven
Raven is Graylark’s frontline visual intelligence platform. It reads pixels, identifies signals, and returns actionable leads in seconds — no metadata required.
Scroll to learn more about RavenRaven
No metadata required — a single image is enough.
Raven
Raven is Graylark's visual intelligence platform. We train AI to understand the world — so it can read every detail in an image and tell you what it means.
What would take hours of manual review returns as high-confidence intelligence in seconds.

Raven reads a single image and returns intelligence an investigator can act on — three distinct ways today, with more always in deployment.
A
B
C
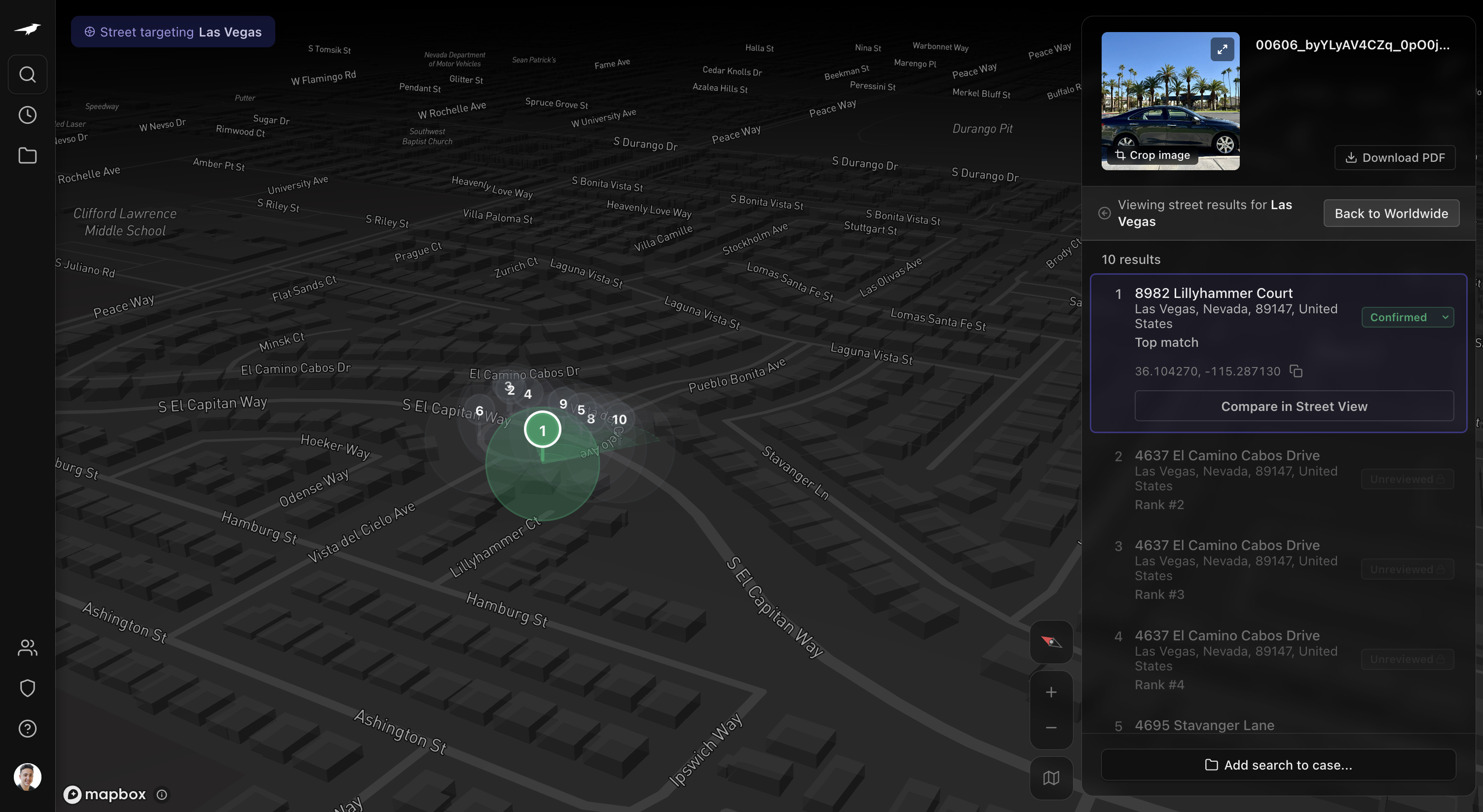
Geoestimation reads environment, structure, and context from a single image — returning ranked, high-confidence regions in seconds.
One frame in. A city out.

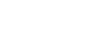
Street Targeting delivers meter-level precision even when clear landmarks are absent — narrowing broad regions to exact locations in seconds.

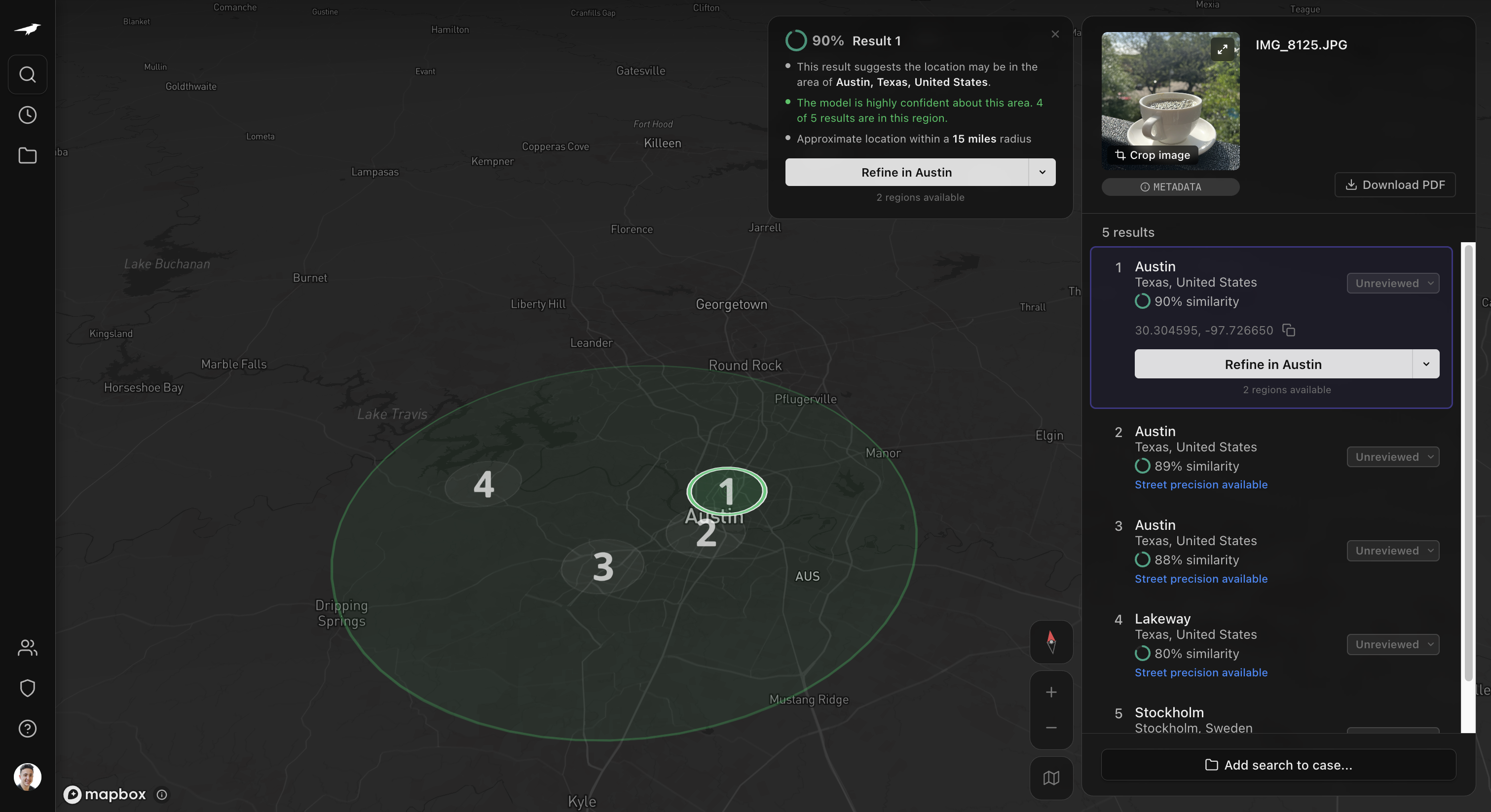
Analyzes partial visual signals across interior and exterior — body lines, materials, trim, controls, lighting — and compares them against a learned vehicle representation to identify make, model, and year with ranked candidates.
It returns ranked candidates scored by visual similarity, enabling fast and reliable identification.

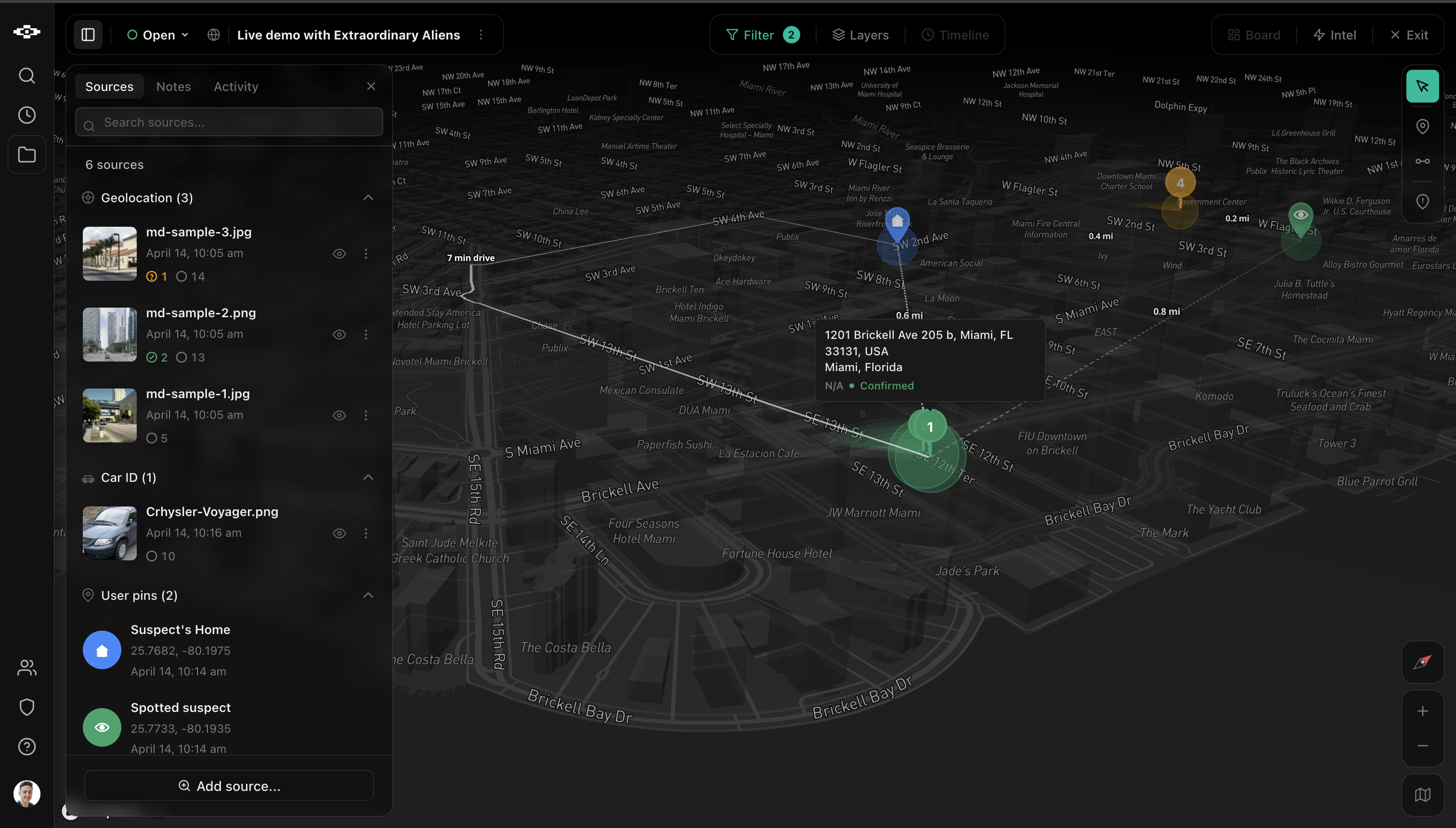
Every search, pin, and source lives inside a shared case. Geolocations, vehicle IDs, and operator annotations pile onto one map.
Raven measures the distance between them, clusters the confident ones, and surfaces the leads that matter — automatically.
Auto-clustered. No manual correlation.
Raven is available to verified agencies and investigative teams. Book a demo to see it run on your own imagery.